| De H-bot |  |
nieuw: Simulator programma is [HIER] te vinden.
De Hbot robot ontleent zijn naam aan de H vorm.
Deze robot beweegt 2-dimensionaal, in de X of de Y richting.
Het bijzondere is de enkele (getande) riem en de twee motoren.
Deze motoren zijn vast gemonteerd, zodat ze niet met de beweging mee hoeven
te versnellen of vertragen.
In dit artikel leg ik uit hoe een Hbot werkt.
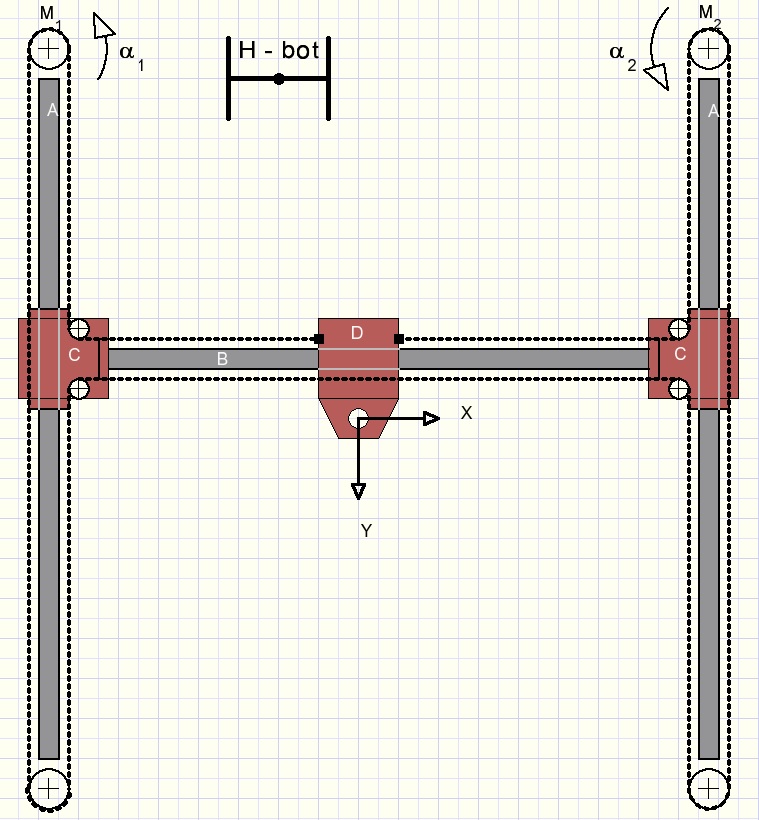
Zie het plaatje hierboven.
M1 en M2 zijn motoren, waarvan de hoekverdraaiing elektronisch wordt geregeld.
(hoek gerekend in radialen)
Als een motor over hoek a verdraait dan beweegt de riem over lengte ar
waarbij r de straal is van het wiel.
B is een horizontale geleider waarover D schuift.
B en C vormen een vast geheel dat vertikaal schuift over geleiders A.
Een getande drijfriem is met beide uiteinden verbonden aan D.
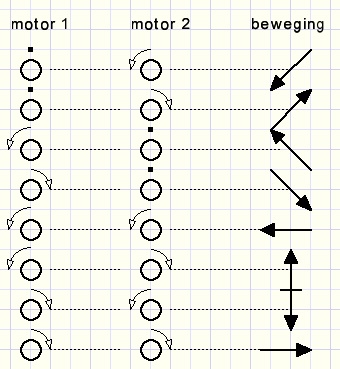
Horizontale, vertikale of diagonale bewegingen ontstaan door de motoren
afzonderlijk linksom- of rechtsom te laten draaien of stil te zetten.
Dit zijn "stappenmotoren", ze bewegen linksom of rechtsom in kleine stapjes (hoekverdraaiingen).
Geval 1
Motor 1 draait linksom, motor 2 staat stil.
Zie het schematische plaatje hieronder:
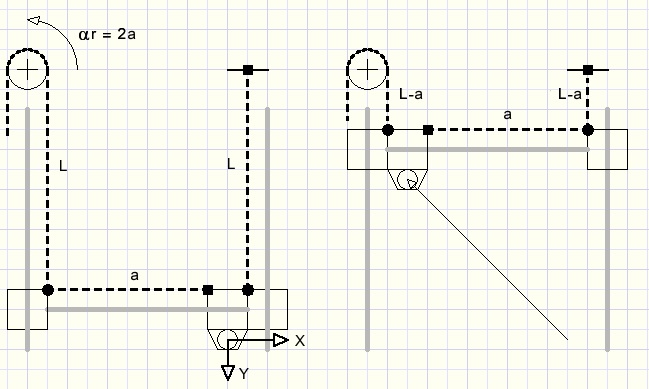
Links is de totale riemlengte L + a + L = 2L + a.
Rechts is de totale riemlengte L-a + L-a + a = 2L - a.
De linker motor heeft de riem over afstand 2a verplaatst.
Verplaatsing over afstand a levert dus een verplaatsing van 0.5a in zowel
horizontale als vertikale richting:
-
x = -0,5a
y = -0,5a
Geval 2
Motor 2 draait linksom over afstand a, motor 1 staat stil.
Ga uit van de positie rechtsboven van de robotpen.
Analoog aan het plaatje hierboven levert dit op
-
x = -0,5a
y = 0,5a
Motor 1 draait linksom, motor 2 draait ook linksom.
Beide motoren verplaatsen de riem over afstand a.
Dit is de optelling van gevallen 1. en 2.
-
x = -0,5a - 0,5a = -a
y = -0,5a + 0,5a = 0
Geval 4
Motor 1 draait linksom, motor 2 draait rechtsom.
Motor 2 verplaatst de riem over afstand -a.
Optellen van de bewegingen
-
x = -0,5a + 0,5a = 0
y = -0,5a -0,5a = -a
Samenvatting